




Система автоматического регулирования давления, разработанная ООО МПФ «Квадр» на базе преобразователя частоты, логического контроллера ОВЕН САУ-МП и таймера ОВЕН УТ1-PiC, нашла своё применение на водонапорных станциях для управления насосными группами с целью поддержания заданных значений технологических параметров.
Применение подающих насосных установок в системе водоснабжения жилых домов является общепринятой нормой. При выборе типа установки проектировщики руководствуются требованием обеспечения потребителя необходимым количеством воды, независимо от расчётных значений. В течение дня реальный разбор сильно зависит от времени суток: максимум (Qmax) в утренние и вечерние часы и минимум (Qmin) в ночное время. Коэффициент неравномерности разбора равен:
Кразборка = Qmax/Qmin.
В течение суток величина коэффициента может изменяться от 2 до 4. Подобный разброс приводит к необходимости регулирования производительности насосного агрегата. С этой целью специалистами ООО МПФ «Квадр» была разработана станция СУН-АТ, предназначенная для управления двумя насосами в системах водоснабжения жилых зданий. Функциональная схема управления насосной станции приведена на рис. 1.
Структура станции СУН-АТ
В состав станции управления СУН-АТ входят: преобразователь частоты (ПЧ), логический контроллер для управления системой подающих насосов ОВЕН САУ-МП, таймер реального времени ОВЕН УТ1-PiC, а также силовая, коммутационная и сигнальная аппаратура. Каждый блок контролирует свой участок технического процесса и обеспечивает безаварийную работу станции. Рассмотрим назначение и работу основных модулей станции.
Частотное регулирование является самым удобным и выгодным способом изменения производительности насоса. Этот метод основан на известной зависимости между частотой вращения двигателя (n) и основными рабочими характеристиками насоса – объёмным расходом (Q), перепадом давления или напором (Н) жидкости и мощностью электродвигателя на валу (N):
Q1/Q2 = n1/n2,
H1/H2 = (n1/n2)2,
N1/N2 = (n1/n2)3
Как видно из соотношений, наблюдаются линейная, квадратичная и кубическая зависимости соответственно расхода, напора и потребляемой мощности от частоты вращения двигателя. Таким образом, изменяя частоту вращения, мы получаем возможность регулировать, к примеру, напор воды. Помимо этого, применение преобразователя частоты позволяет обеспечить:
- возможность оптимальной настройки рабочих параметров насоса под гидравлические характеристики системы;
- экономию электроэнергии (в отдельных случаях до 50%);
- увеличение срока службы насосного агрегата и трубопроводной сети за счёт исключения гидравлических ударов и, как следствие, снижение эксплуатационных затрат.
Следующий блок станции – логический контроллер ОВЕН САУ-МП – управляет насосной установкой в системах водоснабжения в автоматическом режиме, что особенно актуально при оснащении ими жилых зданий, где отсутствует оперативный персонал. САУ-МП обеспечивает:
- автоматический и ручной режимы работы станции;
- поддержание заданного давления на выходе системы в автоматическом режиме вне зависимости от изменения расхода воды и давления на входе;
- равномерную выработку ресурса насосов за счёт чередования их работы;
- защиту насосов от перегрузок, пропадания фазы, коротких замыканий, «сухого хода»;
- включение резервного насоса в случае аварии основного;
- выход на рабочий режим после аварийного отключения напряжения.
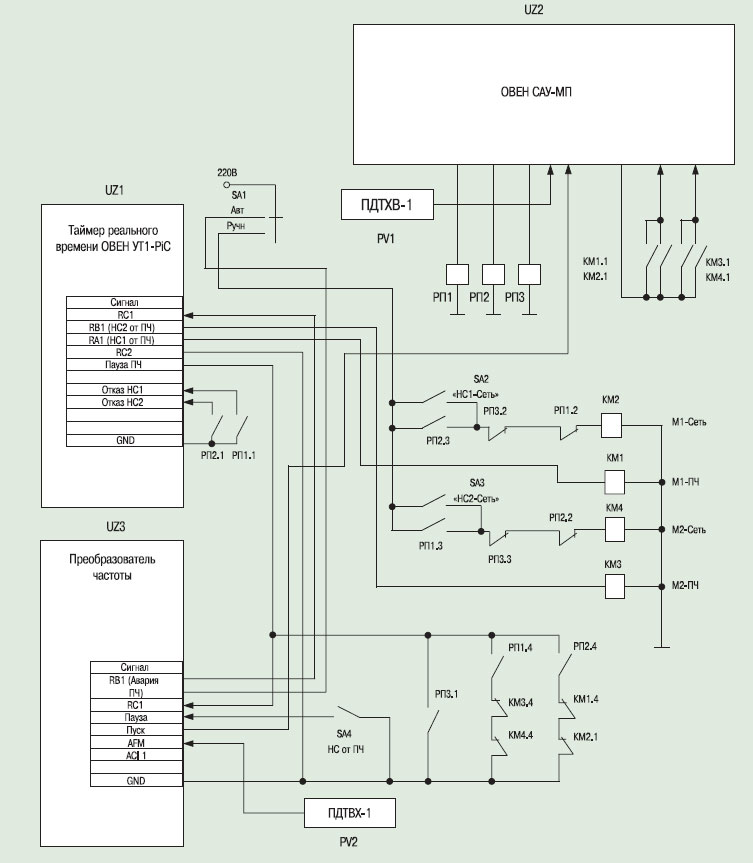
И последний блок станции СУН-АТ – таймер реального времени ОВЕН УТ1-PiC – предназначен для управления насосными агрегатами в регулируемом режиме (чередование включения насосов). Конструктивно станция выполнена в виде шкафа с габаритами 600х500х220 мм, имеющего степень защиты IP54. Как показано на рис. 2, на входном и выходном коллекторах насосной установки стоят датчики давления PV1 и PV2 типа ПДТВХ или КРТ.
Алгоритм работы станции СУН-АТ
Для реализации схемы автоматизации специалистами компании ОВЕН была создана эксклюзивная логика для прибора САУ-МП1. Схема управления станцией СУН-АТ показана на рис. 2.
Рассмотрим более подробно работу станции в автоматическом режиме, когда переключатель SA1 находится в положении «Автомат». После подачи питания САУ-МП анализирует сигнал c датчика давления PV1, контролирующего давление воды на входе, и если оно ниже уставки давления Р1 (минимально допустимое давление воды на входе), выдаёт команду «Пауза» (срабатывает реле РП3), запрещающую работу насосов. Если давление на входе больше уставки Р1, то САУ-П включает режим ожидания.
Пуск насоса производится с помощью переключателя SA4 («НС от ПЧ» на рис. 1). В штатном режиме, т.е. при отсутствии аварийных ситуаций в преобразователе частоты, контакты внутреннего реле RB1 и RC1 замкнуты. Напряжение 220 В через контакты внутреннего реле R1 таймера УТ1-PiC поступает на катушки контакторов КМ1 или КМ2. При замыкании контактов КМ1.1 или КМ3.1 контроллер САУ-МП отрабатывает задержку включения, затем проверяет сигнал c датчика давления PV2, по которому оценивается наличие минимально допустимого давления воды на выходе установки. Сигнал транслируется от датчика давления PV2 через аналоговый выход преобразователя частоты, и, если он ниже уставки Р2 (минимально допустимое давление воды на выходе), выдаёт команду «Отказ». Если давление на выходе больше Р2, то контроллер САУ-МП остаётся в рабочем режиме. Задержка включения Т0 введена для устранения ложных срабатываний САУ-МП при плавном выходе насоса на рабочий режим.
Необходимое давление воды на выходе насосной установки задаётся при помощи пульта управления преобразователя частоты. Сигнал заданного значения сравнивается с текущим сигналом датчика давления PV2, на основании чего формируется и подаётся управляющий импульс на двигатель насоса (рис. 2). Если во время работы насосов сигнал на входе 1 становится меньше уставки Р1 на время, большее Т1, то САУ-МП выдаёт команду «Пауза». Двигатель работающего в это время насоса останавливается. Отмена команды происходит после превышения сигнала уставки Р1 на время, большее Т1. Если во время работы насосов (НС1 или НС2 на рис. 1) сигнал на входе 2 становится меньше уставки Р2 на время, большее Т2 (при условии, что сигнал на входе 1 более уставки Р1) – что свидетельствует об аварийной ситуации – контроллер САУ-МП выдаёт команду «Отказ», в это время срабатывают реле РП1 или РП2.
При изменении положения контактов РП1.4 (РП2.4) преобразователь частоты переводится в режим «Пауза». Контактами РП1.2 (РП2.2) контактор отказавшего насоса отключается, а РП1.1 (РП2.1) сигнализируют таймеру УТ1-PiC о необходимости переключить внутреннее реле R1 в положение, соответствующее запуску резервного насоса. После срабатывания контактора резервного насоса он контактами КМ1.4 (КМ3.4) разрывает цепь включения команды «Пауза» преобразователя частоты, и работа станции продолжается. Контакты реле РП1 (РП2) отказавшего насоса остаются в замкнутом положении до отключения питания прибора.
Периодическая смена насосов на станции СУН-АТ реализуется следующим образом. За 1–2 минуты до переключения насосов замыкаются контакты внутреннего реле R2 таймера реального времени УТ1-PiC, и преобразователь частоты переводится в режим «Пауза». Затем переключаются контакты реле R1 и происходит смена насоса, через 1–2 минуты команда «Пауза» отменяется. Вероятность разрыва трубопроводной системы вследствие возникновения гидроудара исключается благодаря плавному изменению частоты вращения двигателя насоса во время его пуска и остановки.
Ручной режим является резервным. Он предназначен для обеспечения работоспособности станции на время профилактики или ремонта преобразователя частоты. В этом режиме периодическая смена насосов не производится, но задействованы функции защиты от «сухого хода» и включения резервного насоса в случае аварии основного. Логика работы САУ-МП остаётся прежней.
Система обеспечивает энергосбережение за счёт работы всех насосных агрегатов в регулируемом режиме, снижает эксплуатационные затраты благодаря увеличению межремонтного цикла насосного оборудования и уменьшает вероятность разрыва водоводов за счёт исключения гидроударов.
1 алгоритм работы прибора САУ-МП выбирается пользователем при заказе. Для удобства потребителей библиотека алгоритмов работы постоянно обновляется и публикуется на сайте www.owen.ru
Статья опубликована в журнале «Автоматизация и производство» №1 2007

